
基于MSPM0G3507从控的一辆智能(均衡) 小车
发布日期:2025-06-06 05:03 点击:
一般正在弱电范畴,对单片机进修和利用的通用线就是利用开辟板进行调试,可是开辟板有的大多是一些板载零件,没有响应的施行机构。其包含了活动学和动力学两个范畴的物理和数学学问,所以试探利用一款新单片机时,可选一个小车唱工程实践平台,特点如下:不夸张地说,一辆可称为智能的小车(vehicle),硬件上大多会将一款MCU 所有的功能和外设都利用了,本项目用一款TI 的低功耗新产物MCU 从控MSPM0G3507 来实现节制一辆小车(注! 不等同于mini 玩具车),正在G3507上使用PID节制算法和卡尔曼滤波算法完成小车软硬件设想实践平台,让其不只可前后活动/转向活动,还可均衡态静止等活动态。此项目对于进修利用当今低碳时代下的电子范畴的一款新MCU 该当仍是很有实践意义的。此单片机实践项目录要使用G3507从控对一个机械平台- 小车(vehicle)进行节制,仍然连结动态曲立均衡形态,所以起首采用CAD 设想图纸,制制拆卸一个小车机械布局平台,最终设想如下图所示: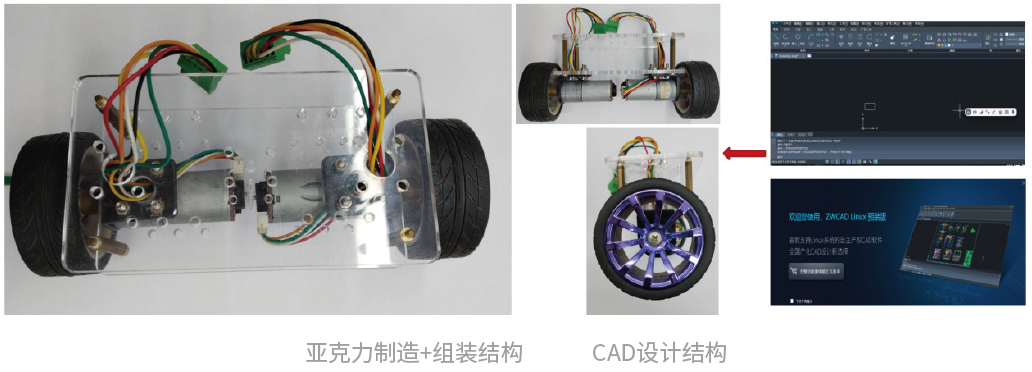 硬件电子部门次要基于TI LP-MSPM0G3507开辟板设想,如图示,从控芯片是TI(仪器)公司的新产物MSPM0G3507。
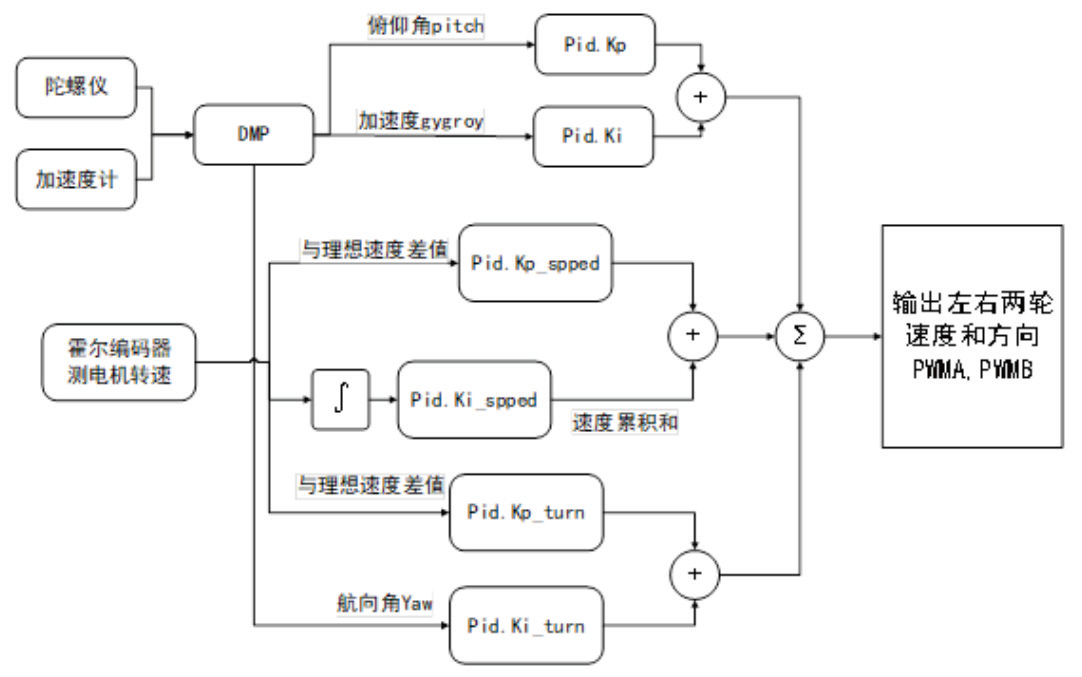
硬件电子部门次要基于TI LP-MSPM0G3507开辟板设想,如图示,从控芯片是TI(仪器)公司的新产物MSPM0G3507。 MSPMOG3507器件供给具有内置错误批改码(ECC)的128KB 嵌入式闪存法式存储器和具有硬件奇偶校验的32KB SRAM。这些器件还包含一个存储器单位、7 通道DMA、数学加快器和各类高机能模仿外设,例如两个12 位4MSPS ADC、一个可设置装备摆设内部共亭电压基准、一个12 位DAC、三个具有内置基准DAC 的高速比力器、两个具有可编程增益的零漂移运算放大器和一个通用放大器。这些器件还供给智能数字外设,例如两个16 位高级节制计时器、三个16 位通用计时器、一个32 位高分辩率计时器、两个窗口式看门狗计时器以及一个具有警报和日历模式的RTC。这些器件可供给数据完整性和加密外设(AES、CRC、TRNG)以及加强型通信接口(四个UART、两个12C、两个SPI 和一个CAN 2。0/FD)。本项目硬件板卡次要环绕TI LP-MSPM0G3507 开辟板进行二次开辟扩展板SHEILD-PCBA,所谓串级PID雷同于,它将PD曲立环(balance)、PI速度环(velocity)和PD转向环(turn)成果别离计较最初相加。获得输出摆布轮的PWMA 和PWMB 输出。其极性代表转向。三个环量“你逃我赶”,“彼此限制”才能一个动态不变的系统,具体计较公式如下:
MSPMOG3507器件供给具有内置错误批改码(ECC)的128KB 嵌入式闪存法式存储器和具有硬件奇偶校验的32KB SRAM。这些器件还包含一个存储器单位、7 通道DMA、数学加快器和各类高机能模仿外设,例如两个12 位4MSPS ADC、一个可设置装备摆设内部共亭电压基准、一个12 位DAC、三个具有内置基准DAC 的高速比力器、两个具有可编程增益的零漂移运算放大器和一个通用放大器。这些器件还供给智能数字外设,例如两个16 位高级节制计时器、三个16 位通用计时器、一个32 位高分辩率计时器、两个窗口式看门狗计时器以及一个具有警报和日历模式的RTC。这些器件可供给数据完整性和加密外设(AES、CRC、TRNG)以及加强型通信接口(四个UART、两个12C、两个SPI 和一个CAN 2。0/FD)。本项目硬件板卡次要环绕TI LP-MSPM0G3507 开辟板进行二次开辟扩展板SHEILD-PCBA,所谓串级PID雷同于,它将PD曲立环(balance)、PI速度环(velocity)和PD转向环(turn)成果别离计较最初相加。获得输出摆布轮的PWMA 和PWMB 输出。其极性代表转向。三个环量“你逃我赶”,“彼此限制”才能一个动态不变的系统,具体计较公式如下: 此中曲立环利用比例+ 微分变量(PD)进行节制,比例系数计较小车倾角取均衡的差(Bias),而微分系数计较小车俯仰角的加快度。小车的曲立环境取积分量无关,具体计较公式如下:
此中曲立环利用比例+ 微分变量(PD)进行节制,比例系数计较小车倾角取均衡的差(Bias),而微分系数计较小车俯仰角的加快度。小车的曲立环境取积分量无关,具体计较公式如下:![]() 速度环利用优化后的限幅比例+ 积分变量(PI)进行节制,比例系数计较小车摆布轮速度之和和零之间差值(Encoder_Least),积分系数计较小车速度差累加和(Encoder_Integral)。因为速度节制取小车的加快度几乎无关,所以只是用PI节制,具体公式如下:
速度环利用优化后的限幅比例+ 积分变量(PI)进行节制,比例系数计较小车摆布轮速度之和和零之间差值(Encoder_Least),积分系数计较小车速度差累加和(Encoder_Integral)。因为速度节制取小车的加快度几乎无关,所以只是用PI节制,具体公式如下:
 均衡小车的具体参数遭到车体布局和地面倾斜角度的影响,参数整定是一个极为单调耗时的工做。参数整定没有好的方式,只能通过不竭测验考试,用“夹逼原则”才能找到最好的值。换言之,好的参数就是大量时间堆积出来的成果,进修利用PID 对于参数的调理不外度逃求。但调出一个能用的参数也许破费点的时间,这里简单论述一下参数调整的过程。对于串级PID 我们一般先调理曲立环,再调理速度环,正在调理完这两个环节之后小车就能很好地走曲线了,最初调理转向环,用于调理转向。每个环的功能如下图所示:启动后设置装备摆设。syscfg文件中各GPIO引脚取便宜驱动板分歧后编译法式,将PID代码拷贝到工程中。参考前述方式进行整定参数。不竭调试代码,进行如下丈量项目,验证能否达标。本实践项目采用MSPM0G3507 做为80MHz从控芯片对小车进行MCU节制,对MPU6050 实现姿势角解算输出,利用DMOS 芯片进行曲流电机驱动调速,还采用霍尔编码器进行脉冲计数实现了小车摆布电机速度读取,霍尔编码器的反馈信号可达到速度环的节制。反馈是节制的焦点,此项目中MCU微节制器,次要感化就是获取小车的反馈消息,做出响应的节制。采用MSPM0G3507低功耗单片机制做小车,做到了比拟以往3。3 V供电的ARM Cortex-M3 系列单片机电压降低至1。62 V仍然能够工做,且需要要的频次80MHz 能够满脚PID 节制运算需要,运算功耗也较着降低。低碳时代布景下,利用如TI 的MSPM0G3507 系列低功耗MCU 研发产物是时代趋向。当下看来MSPM0G3507 比X32F103R系列ARM Cortex-M3单片机更具性价比。
均衡小车的具体参数遭到车体布局和地面倾斜角度的影响,参数整定是一个极为单调耗时的工做。参数整定没有好的方式,只能通过不竭测验考试,用“夹逼原则”才能找到最好的值。换言之,好的参数就是大量时间堆积出来的成果,进修利用PID 对于参数的调理不外度逃求。但调出一个能用的参数也许破费点的时间,这里简单论述一下参数调整的过程。对于串级PID 我们一般先调理曲立环,再调理速度环,正在调理完这两个环节之后小车就能很好地走曲线了,最初调理转向环,用于调理转向。每个环的功能如下图所示:启动后设置装备摆设。syscfg文件中各GPIO引脚取便宜驱动板分歧后编译法式,将PID代码拷贝到工程中。参考前述方式进行整定参数。不竭调试代码,进行如下丈量项目,验证能否达标。本实践项目采用MSPM0G3507 做为80MHz从控芯片对小车进行MCU节制,对MPU6050 实现姿势角解算输出,利用DMOS 芯片进行曲流电机驱动调速,还采用霍尔编码器进行脉冲计数实现了小车摆布电机速度读取,霍尔编码器的反馈信号可达到速度环的节制。反馈是节制的焦点,此项目中MCU微节制器,次要感化就是获取小车的反馈消息,做出响应的节制。采用MSPM0G3507低功耗单片机制做小车,做到了比拟以往3。3 V供电的ARM Cortex-M3 系列单片机电压降低至1。62 V仍然能够工做,且需要要的频次80MHz 能够满脚PID 节制运算需要,运算功耗也较着降低。低碳时代布景下,利用如TI 的MSPM0G3507 系列低功耗MCU 研发产物是时代趋向。当下看来MSPM0G3507 比X32F103R系列ARM Cortex-M3单片机更具性价比。
